| Anchor | ||||
|---|---|---|---|---|
|
Statement of Work
BU: Automotive
Cornell University: Matt Ulinski
AMT Contacts: Mike Laub, Yitao Liu (717-986-5665, email: Yitao.liu@te.com)
Project Scope:
...
- AMT and Cornell University work together to design the process for collecting data, distributions and failure rates. We will ideally carry this out in a systematic and repeatable manner, so that distributions can be compared between products and product families. The data collection will start from one product in one family to make sure the data collection process is robust. It's anticipated that both the AMT and Cornell University teams will do the actual data collection and recording of raw data.
- Modeling will be done based on a two-6DOF robot layout to assemble multi-lock connector product families. The product families contains 2 to 5 parts including plastic housing, plastic insert, rubber seal and plastic latch. We will start with the most fundamental model possible that addresses the key business questions, with a goal of avoiding non-value-add modeling complexity. We anticipate a simulation modeling approach will be adopted, it could be a DES model at first (Simio, Arena, etc.), but we believe a more detailed 3D simulation model (Process Simulate, Visual Components, etc.) would be more suitable for given project scope.
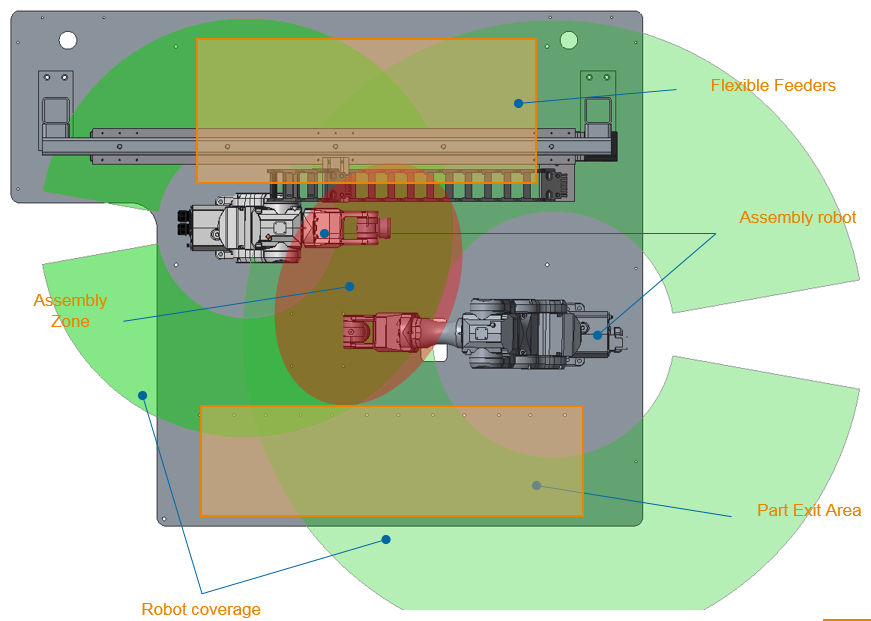
- The process to be modeled consists of two 6-DOF robots that will pick parts from flexible feeders and assemble them which will mimic the existing process of a human operation. Then assembled parts will be put onto the exit area.
- Inputs and outputs of the simulation model include:
...
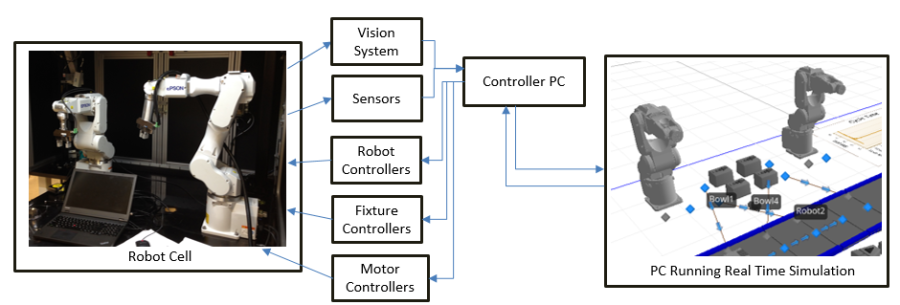
- Based on the simulation model developed in Scope A, the model should be further developed to allow a real-time data input from controllers of the robotic assembly system. The input data includes robots and actuators operation commands, vision and sensor feedback, and actual production performance data from last set of operation. It's anticipated that AMT team will provide the data example for early stage development remotely, further lab test of real-time data collection and input to the simulation model will be done in AMT lab.
- The simulation model should utilize the real-time input data to determine the optimal operation parameters and sequences for the next set of operation. The simulation model can run either in a simulated environment in the early development stage or an actual system in later integration stage in field.
- Inputs and outputs of the real-time simulation model include:
...