ASML – Piezo Manipulator Athermalization
Background
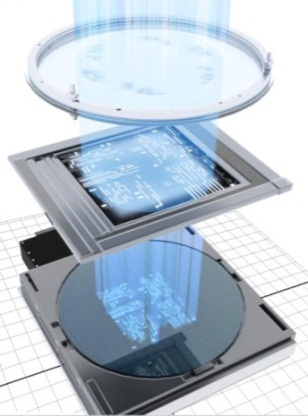
Whether you are reading this on a computer, on a smart phone, on a tablet, or on any other device, you are using ASML's lithography products right now. In lithography, an image on a reticle is projected onto a wafer to etch the design into the wafer. Figure 1 shows a simplified version of some of the key components in the process. The bottom section shows the round wafer in a square carrier, while the middle section shows the rectangular reticle. The top circular section is part of the optical system.
|
Figure 1 – Simplified Lithography Process |
Improvement in the lithographic process is so important because as lithography improves, so does the speed and capability of the microchips that are created from the process. Following "Moore's Law", advances in lithography systems, such as the one shown in Figure 2, have allowed chip manufacturers to continue to shrink feature sizes, with the current state of the art possessing the ability to manufacture feature sizes in the range of 22 nanometers, or about the size of 100 silicon atoms.
|
Figure 2: Lithography System |

With feature sizes in that range, tolerance budgets are pressed to the atomic level. All components and processes contributing to the precision of the equipment must be optimized. For example, a thermal rise of only a few degrees C may be a rounding error in rotating turbomachinery, but in terms of coefficient of expansion at the nano scale, the effect could be devastating.
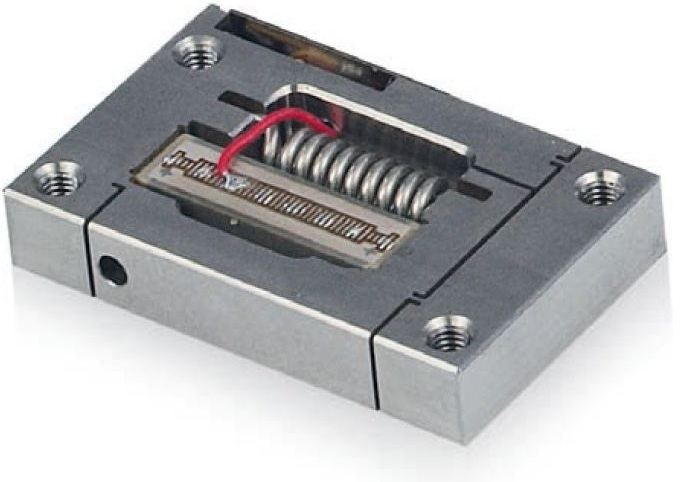
For one application, ASML is looking to use an off the shelf piezo manipulator for high precision mechatronic motion control, shown in Figure 3. However, the device has a large negative coefficient of thermal expansion. Given heat loads, such as that from the piezo electric device itself, the device must be accompanied with a complex closed loop system for positional feedback control to compensate for thermal variations. A design which offsets the negative CTE effect would allow the system to operate "open loop", eliminating the need for position sensors and complications from the feedback control system. This would reduce cost and improve reliability of the overall system.
|
Figure 3: Piezo Manipulator |
Problem Statement
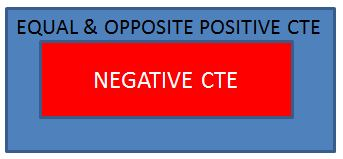
For your project, ASML will be looking to "athermalize" an off the shelf piezo manipulator system. Note that any errors in the "obvious" solution, matching the negative CTE piezo with a positive material in a "brute force" approach, shown in Figure 4, is unlikely to be a practical one, as any errors in the material behavior, system design, material and geometric tolerances would worsen the problem, as would the inherent stress from materials competing to strain in different directions. However, this approach would be a good starting point for the design team.
This effort will include the following requirements:
- Research into current literature on piezo electric drive systems in general, and ASML's system in particular
- System specs will be provided to students at the project kick-off meeting
- ASML will provide the team with the piezo device under study for your use
- Propose solutions to counter-effect the thermal contraction of the system
- The end specification will be to get the device stable to +/- 10 nm over +/- 5 degrees C
- Analyze the down-selected design choice stress and displacement response to thermal loads
- Develop a test system to verify analytical assumptions and design choices
- Modify the analytical approach / final design if needed given test results
|
Figure 4: CTE Matching |
End Game
In the end, if all goes as planned, you will have a quantifiable impact in helping ASML and its endeavors to keep Moore's Law alive for the next generation. You will have demonstrated knowledge of design and analysis, a key skill set in today's competitive job market.
This is by no means an easy endeavor, but we believe your group is up to it and you have 9 months to show us what you got.
If you have any questions, please contact:
Andy Judge
ASML Group Lead – Mechanical Development
andy.judge@asml.com
1 203 761 4328
Steve Roux
ASML Senior Architect
Steve.roux@asml.com
1 203 761 6884
Roberto Wiener
ASML Group Lead – Mechatronics
Roberto.weiner@asml.com
1 203 761 4436
While they will help you, they will not do everything for you. Good luck (and skill)!
Cornell Contact: Matt Ulinski (mu25@cornell.edu)